

原文出處: CN102306011B 一種直線運動單元雙軸同步控制方法 Inventor 單忠德劉豐侯明鵬 Original Assignee 機(jī)械科學(xué)研究總院先進(jìn)制造技術(shù)研究中心 Priority date 2011-05-17 如對您的權(quán)益有所侵侵犯,請及時聯(lián)系網(wǎng)站刪除. 聯(lián)系方式: swdaxue@qq.com

技術(shù)水平已經(jīng)標(biāo)志著國家生產(chǎn)力和工業(yè)實力的重要指標(biāo)。在數(shù)控加工設(shè)備的發(fā)展中,為提升加工系統(tǒng)的產(chǎn)能與加工質(zhì)量,高速與高精度為成為關(guān)鍵。提升數(shù)控加工設(shè)備的生產(chǎn)效率,就必須要在有限的行程內(nèi)提高速度。但隨著速度的提升,驅(qū)動直線運動單元導(dǎo)軌的驅(qū)動力也必然隨著增大,在高速進(jìn)給時,瞬間的驅(qū)動力很容易引起振動現(xiàn)象的產(chǎn)生,一旦加工過程中有振動產(chǎn)生,便會導(dǎo)致加工精度的降低,進(jìn)而影響到工件的加工質(zhì)量,因此往往無法同時兼顧高速度與高精度的需求。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
在傳統(tǒng)數(shù)控加工設(shè)備傳動結(jié)構(gòu)中,如龍門式橫梁機(jī)械結(jié)構(gòu)的控制系統(tǒng),最常用的方法是采用一臺電機(jī)通過傳動鏈或者同步帶等機(jī)械機(jī)構(gòu)驅(qū)動雙邊執(zhí)行機(jī)構(gòu)的方案,但是因傳動機(jī)構(gòu)復(fù)雜、間隙較大,容易造成閉環(huán)控制系統(tǒng)的不穩(wěn)定。由于驅(qū)動系統(tǒng)的結(jié)構(gòu)剛性及慣性匹配不佳容易造成設(shè)備瞬間加減速時發(fā)生震動現(xiàn)象而且運行噪聲大,維護(hù)困難。另外若用于負(fù)載轉(zhuǎn)動慣量較大的場合,由于傳動效率低,必然要選用功率很大的電動機(jī),亦不符合節(jié)能綠色制造的設(shè)計理念。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
基于以上因素,數(shù)控加工設(shè)備在驅(qū)動軸的設(shè)計上采用雙軸同步驅(qū)動方式為佳。此方式不但可以增加進(jìn)給系統(tǒng)的結(jié)構(gòu)剛性,還可以減少因驅(qū)動力偏心所引起的力矩影響,雙電機(jī)同步驅(qū)動方式,除了可加強系統(tǒng)的驅(qū)動力外,也可提升系統(tǒng)的應(yīng)答速度。與其他雙軸同步控制方法相比,本發(fā)明方法結(jié)構(gòu)簡單,容易實現(xiàn),且運行穩(wěn)定可靠。此外,該方法特別適用于較大負(fù)載能力和大跨距的龍門框架結(jié)構(gòu)或者橋式框架結(jié)構(gòu)系統(tǒng)。 solidworks教程網(wǎng)致力于提供機(jī)械的行業(yè)技術(shù) ,為行業(yè)人士建立和拓展全技術(shù)能力提供技術(shù)服務(wù),是機(jī)械行業(yè)一個跨屏技術(shù)互動應(yīng)用系統(tǒng)。更多行業(yè)技術(shù)請關(guān)注微信 solidworks教程網(wǎng)文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
數(shù)控動柱式龍門加工中心雙軸同步控制方法
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
為解決單軸驅(qū)動雙邊電機(jī)的速度低,傳動機(jī)構(gòu)復(fù)雜、間隙較大,系統(tǒng)不穩(wěn)定等問題以及其他雙軸同步控制的方法復(fù)雜,難于實現(xiàn),成本高等問題,提出本發(fā)明方法。內(nèi)容包括 : 1. 一種直線單元運動過程雙軸同步控制方法,步驟 : a. 兩個運動軸采用相同導(dǎo)軌絲杠形式的執(zhí)行機(jī)構(gòu) ; b. 選取相同電機(jī)并與控制器連接方式相同 ;c. 兩個電機(jī)驅(qū)動器的輸入接口分別與控制器的兩個指令輸出模塊相連 ; d. 將 1 號電機(jī)處于斷電停止工作狀態(tài),使 2 號電機(jī)單獨接收命令運行。根據(jù)負(fù)載情況,利用電機(jī)驅(qū)動器自調(diào)節(jié)功能記錄下該負(fù)載狀態(tài)下的參數(shù)情況,參數(shù)包括 : 剛性、慣量比、PID、振動檢測值、增益 ;e. 再將 2 號電機(jī)處于斷電停止工作狀態(tài),使 2 號電機(jī)單獨接收命令運行。根據(jù)負(fù)載情況,利用電機(jī)驅(qū)動器自調(diào)節(jié)功能記錄下該負(fù)載狀態(tài)下的參數(shù)情況,參數(shù)包括 : 剛性、慣量比、PID、振動檢測值、增益 ;f. 取兩組參數(shù)中的最大值分別對雙軸電機(jī)參數(shù)進(jìn)行設(shè)定并鎖死,同時使電機(jī)驅(qū)動器的免調(diào)節(jié)功能有效 ;g. 在上位機(jī)軟件中同時分別向兩個電機(jī)發(fā)送相同指令。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3282.html
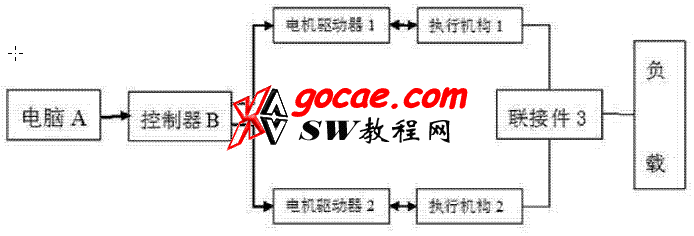
運動控制器 B 的數(shù)據(jù)信號輸入端與電腦 A 的以太網(wǎng)口利用網(wǎng)線連接,控制器 B 的脈沖輸出端分別于兩個伺服驅(qū)動器 1 和伺服驅(qū)動器 2 連接。聯(lián)接件 3 將執(zhí)行機(jī)構(gòu) 1 和執(zhí)行機(jī)構(gòu) 2 跨接為一個整體,負(fù)載可在聯(lián)接件 3 上移動。
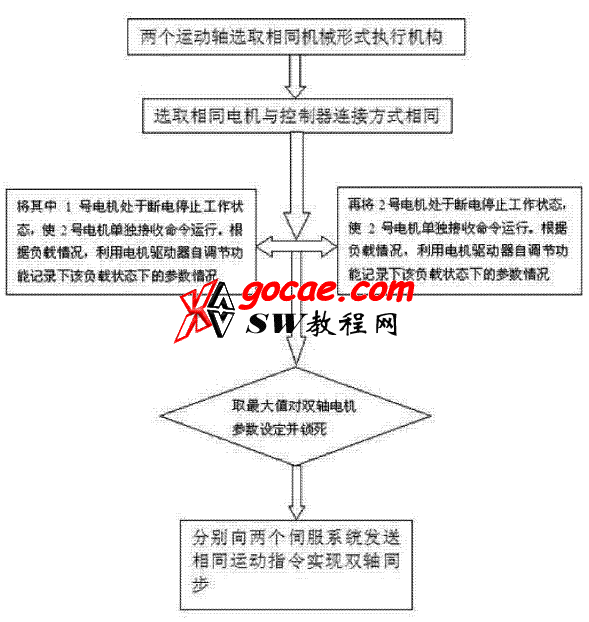
兩個運動軸采用相同導(dǎo)軌絲杠形式的執(zhí)行機(jī)構(gòu) ;選取相同伺服電機(jī),電機(jī)驅(qū)動器的信號輸入接口分別與運動的控制器的信號輸出模塊相連,并采用相同的脈沖+ 方向的控制方式 ;將其中 1 號電機(jī)的主動力線和編碼器線斷開使其處于斷電停止工作狀態(tài),使 2 號電機(jī)單獨接收命令運行。根據(jù)負(fù)載情況,利用電機(jī)驅(qū)動器自調(diào)節(jié)功能記錄下該負(fù)載狀態(tài)下的參數(shù)情況 ;再將 2 號電機(jī)的主動力線和編碼器線斷開使其處于斷電停止工作狀態(tài),使 1 號電機(jī)單獨接收命令運行。

根據(jù)負(fù)載情況,利用電機(jī)驅(qū)動器自調(diào)節(jié)功能記錄下該負(fù)載狀態(tài)下的參數(shù)情況 ;取兩組參數(shù)中的最大值分別對雙軸電機(jī)參數(shù)進(jìn)行設(shè)定使電機(jī)驅(qū)動器的免調(diào)節(jié)功能有效 ;在上位機(jī)軟件中同時分別向兩個電機(jī)發(fā)送相同指令實現(xiàn)同步控制。