

在機(jī)械自動化領(lǐng)域,往往需將產(chǎn)品從一個位置轉(zhuǎn)移到另一個位置,并使其旋轉(zhuǎn)一定角度,以便進(jìn)行下一道加工工序,例如把產(chǎn)品由一位置的水平狀態(tài)轉(zhuǎn)換成另一位置的豎直狀態(tài)。舉例來說,在注塑自動化領(lǐng)域,常常利用注塑機(jī)專用取件機(jī)械手將產(chǎn)品從注塑機(jī)模具中取出,再由專門的治具翻轉(zhuǎn)機(jī)構(gòu)將產(chǎn)品旋轉(zhuǎn)一定角度之后放置到輸送帶、產(chǎn)品放置框或者下一道工位上,或者與之相反,利用上述的治具翻轉(zhuǎn)機(jī)構(gòu)把待加工件從輸送帶或其他工位轉(zhuǎn)移到機(jī)械手治具端。
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
為了解決這個需求,現(xiàn)有技術(shù)中常采用的方法是使用兩個電機(jī)或氣缸等驅(qū)動裝置,一個旋轉(zhuǎn)驅(qū)動實現(xiàn)翻轉(zhuǎn)功能,另一個直線驅(qū)動實現(xiàn)前進(jìn)后退功能,然而這種翻轉(zhuǎn)機(jī)構(gòu)成本較高,結(jié)構(gòu)較為復(fù)雜,動作不夠靈活,占用空間也較大,動作周期較長。現(xiàn)有技術(shù)中還有另一種典型的結(jié)構(gòu)型式為機(jī)械手側(cè)姿結(jié)構(gòu),利用氣缸的伸縮帶動旋轉(zhuǎn)板轉(zhuǎn)動,但此類結(jié)構(gòu)往往只能實現(xiàn)單一的旋轉(zhuǎn)動作,且旋轉(zhuǎn)空間較為有限,需配合機(jī)械手臂前后上下平移,因此占用空間大,受到機(jī)器結(jié)構(gòu)、高度、大小的限制且角度不可調(diào),動作也不夠靈活。 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
專門組合于、或配置于、或?qū)iT適用于機(jī)床有關(guān)的工件操縱裝置,如用于運(yùn)送、加料、定位、卸下、分級的的技術(shù)領(lǐng)域,特別涉及一種利用系統(tǒng)的相對旋轉(zhuǎn)運(yùn)動以減少電機(jī)數(shù)量并實現(xiàn)輸出軸上的旋轉(zhuǎn)板旋轉(zhuǎn)動作的治具翻轉(zhuǎn)裝置。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
自動化機(jī)器人夾具翻轉(zhuǎn)裝置
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
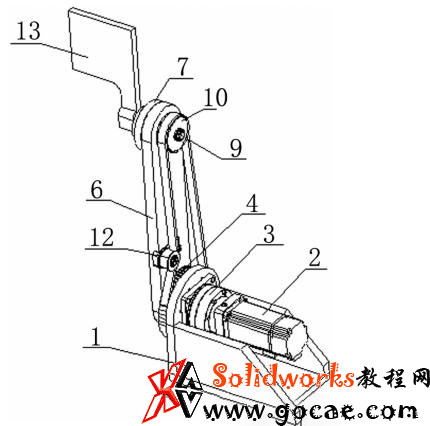
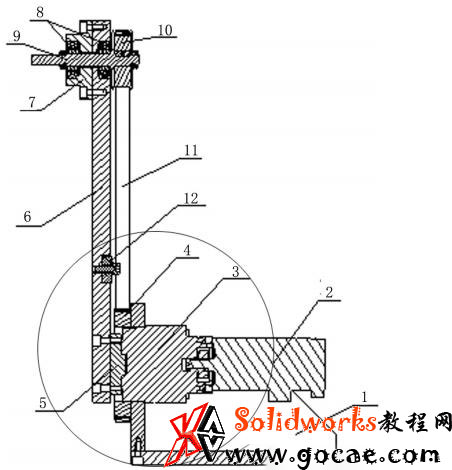
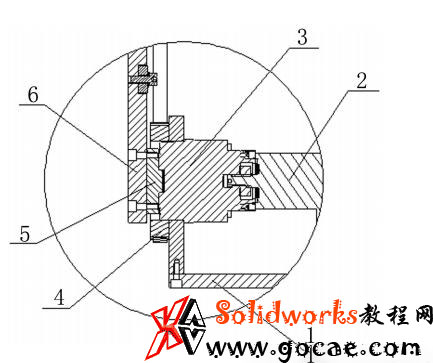
包括固定座1,固定座1上設(shè)有驅(qū)動機(jī)構(gòu),驅(qū)動機(jī)構(gòu)的輸出端處同軸設(shè)有定同步帶輪4和過渡圓盤法蘭5,定同步帶輪4固定設(shè)于固定座1上,過渡圓盤法蘭5連接至擺臂6的下部,擺臂6的上部設(shè)有輸出軸9,輸出軸9一端同軸設(shè)有動同步帶輪10,定同步帶輪4和動同步帶輪10設(shè)于擺臂6同側(cè),定同步帶輪4和動同步帶輪10通過同步帶11連接,定同步帶輪4的分度圓直徑是動同步帶輪10的分度圓直徑的2倍;輸出軸9相對于動同步帶輪10的一端設(shè)有旋轉(zhuǎn)板13。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
在固定座1上的驅(qū)動機(jī)構(gòu)的輸出端處同軸設(shè)置定同步帶輪4和過渡圓盤法蘭5,并將定同步帶輪4固定在固定座1上,保證定同步帶輪4相對于固定座1是不動的;文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
驅(qū)動機(jī)構(gòu)的輸出端通過過渡圓盤法蘭5連接擺臂6,使得驅(qū)動機(jī)構(gòu)在作業(yè)時可以帶動擺臂6轉(zhuǎn)動,同時在擺臂6的上部設(shè)置輸出軸9,輸出軸9一端設(shè)置與定同步帶輪4通過同步帶11配合設(shè)置的動同步帶輪10,另一端設(shè)置旋轉(zhuǎn)板13,且定同步帶輪4的分度圓直徑是動同步帶輪10的分度圓直徑的2倍,即當(dāng)擺臂6轉(zhuǎn)動時,同步帶11會沿著定同步帶輪4進(jìn)行轉(zhuǎn)動,當(dāng)同步帶11繞定同步帶輪4擺動∠α?xí)r,動同步帶輪10相對擺臂6轉(zhuǎn)過的角度是2∠α,考慮相對運(yùn)動,最終旋轉(zhuǎn)板13相對固定座1的旋轉(zhuǎn)角度為2∠α-∠α=∠α,旋轉(zhuǎn)方向上,旋轉(zhuǎn)板13和擺臂6的旋轉(zhuǎn)方向正好相反,實現(xiàn)旋轉(zhuǎn)板13既翻轉(zhuǎn)又移動的效果。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3066.html