現(xiàn)有的加工中心中,對于所加工的物件需要正反面雙面加工時,往往需要先加工 一面,然后卸下所加工的物件反裝后再進行第二次加工,才能實現(xiàn)同一物件的正反面加工。 因此,這種加工方式加工效率不高,并且,拆卸后反裝會改變物件的位置,需要重新對物件 的位置進行定位,對于正反面加工的一致性有要求的物件,加工精度難以得到保證。
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
目前,雕刻機發(fā)展的主要技術(shù)為高速高精加工技術(shù)。但是,現(xiàn)有的雕刻機的Z軸移 動機構(gòu)均為矩形主體結(jié)構(gòu),導(dǎo)致機頭比較笨重,不利于機頭的高速運動,因此,影響了雕刻 機的高速高精度的發(fā)展。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
雙工作臺優(yōu)點
設(shè)置對稱設(shè)置的兩組夾具,一組夾具先夾持住所加工的物件,待一面加工完之后,另一組夾具取走該組夾具上的物件,對物件的另一面進行加工,使得所加工的物件在同一加工中心能夠完成正反面的加工, 提高了加工效率;并且,同一物件的正反面由同一套加工中心加工,具有相同的定位標準, 加工精度更高。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
雕刻機Z軸移動機構(gòu),機頭的安裝部的部 分或全部改為橫截面為梯形的柱體結(jié)構(gòu),相對減輕了機頭的重量,增設(shè)輔導(dǎo)軌,提高柱體結(jié) 構(gòu)穩(wěn)定性,從而利于機頭的高速運動,提高運動加速度;當然,并不局限于機頭的安裝部設(shè) 計為梯形的柱體結(jié)構(gòu),為了降低機頭重量,整個機頭都可以設(shè)計成橫截面為梯形的柱體結(jié) 構(gòu)。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
箱中箱龍門雙工作臺高速加工中心結(jié)構(gòu)設(shè)計
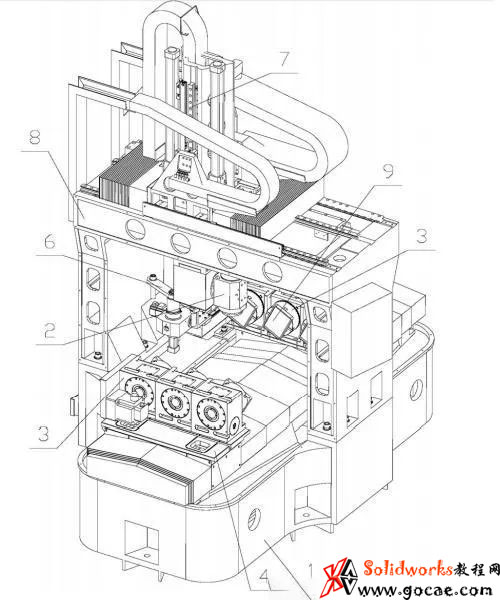
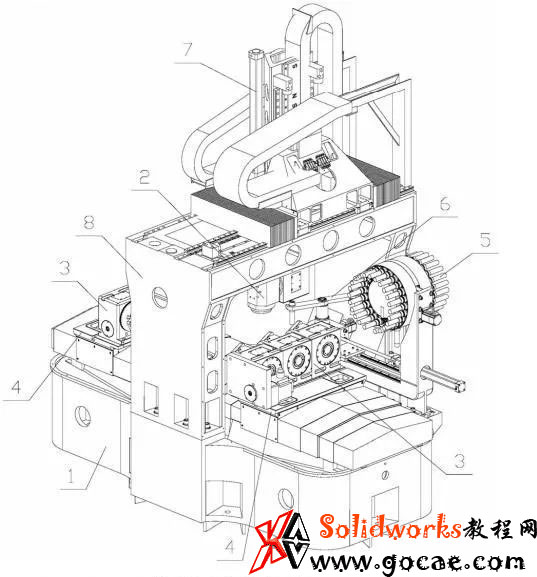
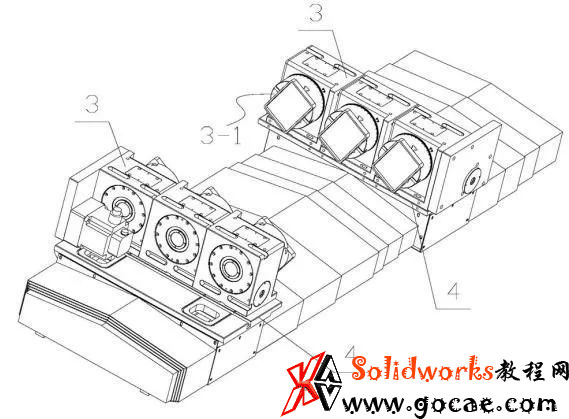
圖中1、底座,2、主軸,3、夾具,3-1、夾持面,4、夾具驅(qū)動機構(gòu),5、刀庫,6、換刀機構(gòu), 7、主軸驅(qū)動機構(gòu),8、支架,9、所加工的物件。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
 文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
包括底座1和用于加工的主軸2, 底座1上具有夾具3,夾具3的一側(cè)具有夾持面3-1,底座1上具有兩組夾具3,且兩組 夾具3的夾持面3-1相互對稱設(shè)置,主軸2位于兩組夾具3之間。文章源自solidworks教程網(wǎng)-http://m.66kg.cn/3669.html
一組夾具3先夾持住所加 工的物件9,待一面加工完之后,另一組夾具3取走該組夾具上的所加工的物件9,對所加工 的物件9的另一面進行加工,使得所加工的物件9在同一加工中心能夠完成正反面的加工, 提高了加工效率;并且,同一物件的正反面由同一套加工中心加工,具有相同的定位標準, 加工精度更高。夾具3為吸附式夾具,例如,磁吸式夾具或者真空吸附式夾具。
采用這種吸附 式夾具對所加工的物件9正反面位置的要求不高,在加工完一面時,另一組夾具從該組夾具 3上將所加工的物件9吸附過來,所加工的物件9位置不會發(fā)生變動,對主軸2的加工控制也 比較方便。
還包括夾具驅(qū)動機構(gòu)4,夾具驅(qū)動機構(gòu)4驅(qū)動一組 夾具3靠近或遠離另一組夾具3。兩組夾具3均具有夾具驅(qū)動機構(gòu)4。夾具驅(qū)動機構(gòu) 4的實現(xiàn)方式有很多種,例如可以在底座1上設(shè)置滑軌,兩組夾具3均與滑軌滑動連接。
主軸2的一側(cè)設(shè)有刀庫5和換刀機構(gòu)6,換刀機構(gòu)6往返于刀庫5與主 軸2之間。還包括主軸驅(qū)動機構(gòu)7,底座1上方具有支架8,主軸驅(qū)動機構(gòu)7固定在支 架8上。主軸驅(qū)動機構(gòu)7包括驅(qū)動主軸2轉(zhuǎn)動的轉(zhuǎn)動機構(gòu),主軸2的轉(zhuǎn)動平面垂 直于兩組夾具3的夾持面3-1之間的對稱面,且垂直于兩組夾具3所在的平面。
復(fù)合加工中心,可以實現(xiàn)八軸五聯(lián)動復(fù)合加工,其中,兩組夾具3分 別具有兩軸(向相對的夾具3來回移動的一軸,夾具3自身具有轉(zhuǎn)動軸),換刀機構(gòu)6往返于刀 庫5與主軸2之間的一軸,主軸驅(qū)動機構(gòu)7具有三軸(垂直于夾具移動方向的水平一軸,上下 移動方向的一軸,以及主軸在兩組夾具方向轉(zhuǎn)動的一軸 )。這八軸中具有五軸是同時使用 的,實現(xiàn)了對所加工的物件9的正反面分別加工。
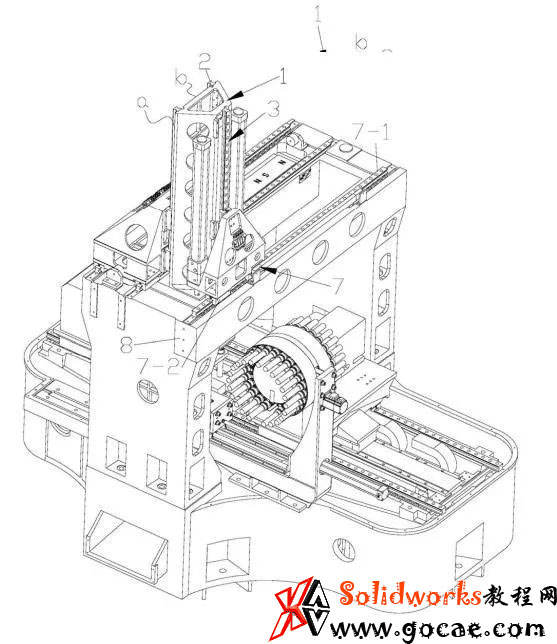
圖中1、機頭,1-1、安裝部,2、主導(dǎo)軌,2-1、第一固定端,2-2、第一滑動端,3、輔導(dǎo) 軌,4、直線電機,7、橫向驅(qū)動機構(gòu),7-1、第二固定端,7-2、第二滑動端,8、橫梁,a、棱邊,b、較 長底邊。
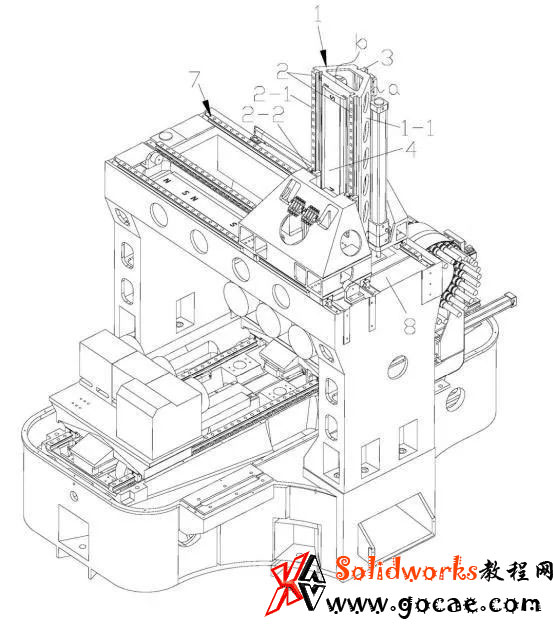
Z軸移動機構(gòu),包括豎向驅(qū)動機構(gòu)和機 頭1,機頭1上具有安裝部1-1,豎向驅(qū)動機構(gòu)與安裝部1-1連接,豎向驅(qū)動 機構(gòu)驅(qū)動機頭1沿Z軸上下移動,安裝部1-1的部分或全部為柱體結(jié) 構(gòu),柱體結(jié)構(gòu)的橫截面為梯形;豎向驅(qū)動機構(gòu)包括主導(dǎo)軌2和輔導(dǎo)軌3,主導(dǎo)軌 2和輔導(dǎo)軌3分別安裝在柱體結(jié)構(gòu)的梯形兩底邊上,且主導(dǎo)軌2和輔導(dǎo)軌3均與柱體 結(jié)構(gòu)的棱邊a平行。柱體結(jié)構(gòu)的橫截面為等腰梯形。
為了減輕重量,柱體結(jié)構(gòu) 為空心框架體。主導(dǎo)軌2安裝在柱體結(jié)構(gòu)的梯形的較長底邊b上,主導(dǎo)軌2和輔導(dǎo)軌3 均為直線導(dǎo)軌。主導(dǎo)軌2包括兩條相互平行的直線導(dǎo)軌。主導(dǎo)軌2的兩條直線導(dǎo)軌相對 于輔導(dǎo)軌3相互對稱。還包括橫向驅(qū)動機構(gòu)7,主導(dǎo)軌2具有第一固定端2-1和第一滑動端2-2,橫向驅(qū)動機構(gòu)7具有第二固定端7-1和第二滑動端7-2,第一固定端2-1與機頭1固定,橫向驅(qū)動機構(gòu)7的第二滑動端7-2與主導(dǎo)軌2的第一滑動端2-2固定,橫向驅(qū)動機構(gòu)7 的第二固定端7-1與橫梁8固定。柱體結(jié)構(gòu)通過直線電機4驅(qū)動。